










ZWHAND灵巧手如何重塑机器人自由度与驱动技术
 2025-07-01
2025-07-01
在机器人技术快速发展的今天,灵巧手作为人形机器人与物理世界交互的关键执行器,其性能直接决定了机器人能否胜任精细、复杂的操作任务。兆威机电凭借其在微型驱动领域20余年的技术积累,推出了具有17-20个自由度的全驱直驱灵巧手,不仅在自由度数量上实现突破,更在驱动技术上开创了全新范式,成为行业标杆。
自由度突破:从仿生到超越
兆威灵巧手的17个主动自由度设计(可扩展至20个)使其在灵活性上远超行业平均水平(通常为12个自由度),并接近人手的27个自由度。这一设计使得灵巧手能够执行穿针引线、精密装配等高度复杂的任务,在医疗手术、工业自动化等领域展现出巨大潜力。相较之下,特斯拉Optimus灵巧手为16自由度,智元机器人则为12自由度,兆威的方案在精细化操作上更具优势。
自由度的提升并非简单的数量叠加,而是基于仿生学原理的优化布局。兆威的灵巧手采用单关节驱动技术,每个指节均配备独立驱动单元,确保运动控制的精准性与协调性。拇指的对向运动能力、指节的独立控制以及腕部的多自由度协同,共同构成了一个高度仿生的操作体系,使其能够适应不同形状、材质的物体抓取。
全驱直驱架构
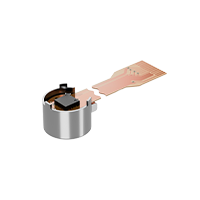
传统的灵巧手多采用腱绳或齿轮驱动,存在能量损耗大(效率仅65%-75%)、响应延迟高(≥25ms)等问题。兆威机电的创新之处在于将微型步进电机或空心杯电机直接嵌入指节,结合滚珠丝杠推杆实现直线驱动,彻底消除了传统传动方式的能量损耗(效率提升至≥95%)。
这一设计的核心在于微型化集成——电机、减速器、丝杠驱动单元高度集成,传动链长度缩短至35mm,响应时间低至8ms,力控分辨率可达0.05N(相当于捏住一张A4纸的力度)。此外,空心杯电机的高功率密度(>0.5kW/kg)配合丝杠的机械增益,使单指抓握力达到10-20N,同时整体重量降低30%以上。
实现这一突破性设计并非易事。微型化集成带来了散热与负载平衡的挑战。兆威采用陶瓷轴承+导热壳体的创新散热方案,并结合双向止推结构确保轴向负载平衡,使系统在高频次操作下仍能保持稳定。此外,车规级工艺标准与10万次疲劳测试验证,确保了10年以上的设计寿命,远超传统腱绳驱动的50万次使用寿命限制。
兆威机电并未止步于当前的机械性能突破,其下一代技术研发已瞄准更高层次的智能化。与中科院深圳先进院合作的“灵巧手智能系统联合实验室”正致力于AI小脑控制算法与电子皮肤触觉感知技术的研发。未来,灵巧手将具备自主学习能力,能够动态适应不同物体的抓取策略,进一步拓宽其在服务机器人、医疗辅助等领域的应用场景。








